


A new article published by Royal Holloway and TRL highlights that the self-driving vehicles of the future will require occasional remote human intervention in the event that the vehicle's technology fails. Current industry figures estimate that an automated vehicle may need remote human assistance approximately every 13,000 miles.
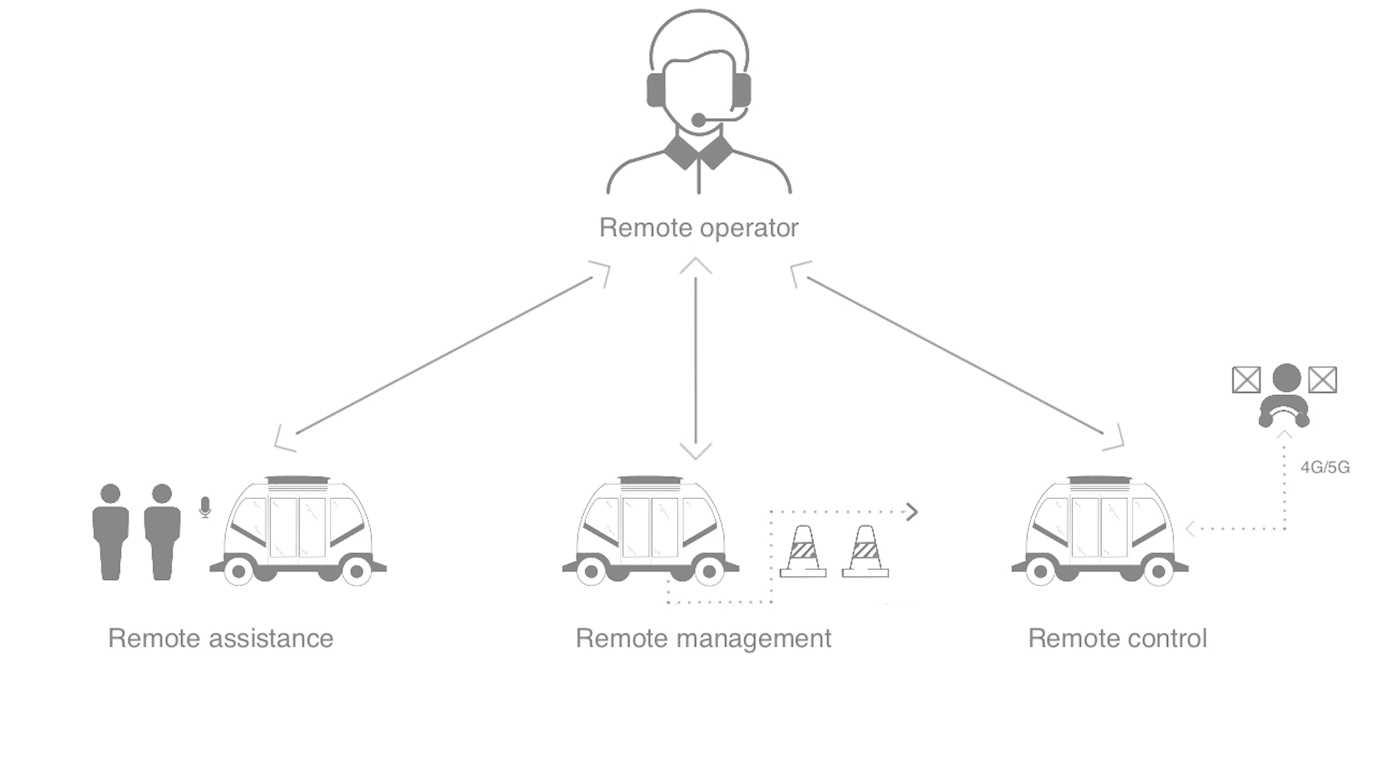
The researchers are calling on the autonomous vehicle industry to update current understanding of automated driving to incorporate the role of a human operator from a remote location. The remote operator may offer assistance to passengers on-board or remotely manage the situation for the vehicle and direct its next course of action. In more extreme cases, they may need to take over full remote control and drive the vehicle to a safer location. Crucially, industry standard regulations and safety protocols will need to be introduced with regards to the training required for remote operation and the equipment and technology essential to the role.
There are significant differences between being aware of your surroundings in a normal driving environment and taking temporary control of a vehicle from a remote location. As the UK starts to transition towards increasing levels of vehicle autonomy, the article emphasises the urgent need to engage in research into the unique challenges that remote operators will face when trying to build awareness of the environment around a vehicle that they are not physically occupying.
The article, published in Cognitive Research: Principles and Implications, argues that, in remote environments, it may be beneficial to make a remote operator's driving experience as realistic as possible, using technology such as Augmented Reality and Virtual Reality to improve their sense of embodiment within the vehicle.
Clare Mutzenich, an ESRC-funded PhD researcher from the Department of Psychology at Royal Holloway, said: “If a problem arises in an automated vehicle that prevents it from navigating independently to its destination, a remote human operator may be required to intervene.
“We have argued that the sector’s understanding of vehicle automation should be expanded to include the role of the remote operator, who would be intervening from a separate location.
“Our research examines what level of awareness is sufficient to remotely control a vehicle safely, how long is required to build up this level of awareness and whether situational awareness would be improved by the provision of additional information.”
Dr Shaun Helman, Chief Scientist at TRL and co-supervisor for the PhD, said: “Work at TRL has shown clearly that the promise of automated vehicles will only be realised if we have a holistic understanding of the system. Technology alone is never the answer, and this project is filling one important gap in our current understanding – that of the needs of remote operators.”
Camilla Fowler, Head of Automation at TRL added: “At TRL we are researching the implications for remote operation from a safety assurance perspective and discussing the liability issues associated, so this research exploring the burden on a remote operator is an essential piece of the puzzle.”